
On 5 August, the Mars Science Laboratory Curiosity will attempt its landing on the Red Planet.
MSL is an exciting mission, the biggest rover we’ve ever sent to Mars, packed full of science experiments and capabilities, and it’s going to start things off with a daring landing detailed in this NASA PR video:
For more information about MSL, I strongly suggest these blogs.
Something that bugs me about MSL, though, is how every time the Internet hears about it, there’s a slew of commentary about how terrible an idea the landing system is. (For a good example, look at the comments on Gizmodo’s blurb about the above video.) People wonder why the system has to be so complex, sometimes asking what happened to the “KISS” (“Keep It Simple, Stupid!”) philosophy of engineering. Others lament how risky the landing system seems. Still more wonder why Curiosity can’t bounce down like the Sojourner or MER rovers did. I’ve even heard some of the mission scientists express reservations about the “skycrane” part of the landing process.
This thing is, each stage of this landing system was driven by engineering requirements. The guys at JPL didn’t just think one day, “hey, you know what would be cool? Landing by rappelling from a jetpack!” This is, in fact, the best solution that the engineers came up with for landing something as massive as the Curiosity rover on Mars.
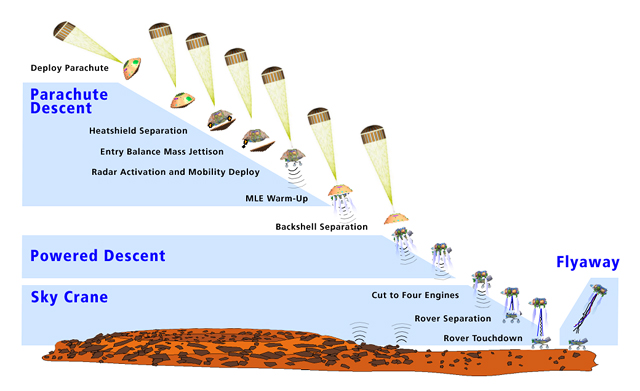
Let’s look for a moment each successive step in the process:
{kind=link}
- The heat shield. A lander screams in towards Mars at several kilometers per second – more than orbital velocity. Then we want to get it through an atmosphere, and, really, there’s no choice in the matter: as soon as we hit the atmosphere, we get friction with air molecules. A lot of friction. Friction that superheats our spacecraft. So, we’d better put a heat shield on our vehicle!
- The parachute. The heat shield gets our spacecraft down to about Mach 2, but if we were to rely on it the whole time we wouldn’t slow down enough before smacking into the Martian surface. We’ve got to get the speed of our vehicle down, and one of the obvious (and lightweight!) ways to do this is by deploying a parachute. (This is actually the part of the process that boggles my mind the most. Deploying a parachute at Mach 2! Yikes! Yet this is what our last three Martian rovers have all done, successfully.)
- Jettisoning things. After we deploy the parachute, the heat shield is just dead weight pulling us down. We want to get the most out of our parachute that we can, so we drop the heat shield away with some pyrotechnic charges. When we don’t need the parachute any more, we’ll similarly cut it loose.
- Retro-rockets. Mars’ atmosphere is so thin that even the combination of a capsule heat shield and a parachute doesn’t slow the probe down enough to land safely! Earth’s atmosphere – about a hundred times thicker than Mars’ – is fine for this. We can stuff astronauts in a capsule that rides the parachute all the way down, and doesn’t even need to drop its heat shield. But on Mars, even after the parachute gets our falling vehicle to terminal velocity, we still need to do something to slow it down! So we fire some rockets downward, killing off the rest of our speed. And the rover hangs in midair, about twenty meters above the planet surface. Up until this point, the MSL and MER landing sequences are basically the same.
- Rappelling. Finally, we need a way to get down that last few meters to the surface. On the Pathfinder, Spirit, and Opportunity vehicles, we popped airbags out on all sides of the lander and just let them go, inspiring egg-drop competition participants everywhere. But Curiosity is simply too big for this to work: it would be like taking our egg drop and substituting a paperweight for the egg. The rover would squish the balloons, still smashing itself against the hard ground. Another option might have been to have MSL sitting on a platform which descends on rockets all the way to the surface, like Phoenix or the Viking landers did. But the platform you would need to do that properly would end up being big enough that you’d have to go tell the JPL robot-builders to make a smaller rover. So instead, we just lower the rover down on a rope, and as soon as the rover registers touchdown, we fly the rocket platform away.
The controllers we will need to get the skycrane to work are really nothing to fear. They are not fundamentally different from the controllers that keep launch rockets pointing up when our probes leave Earth in the first place. But beyond the general terms, analogous robotic piloting happens all over on Earth – from military drones to quadrotors in research labs. As a dynamics and control engineer, I think this design would have been a challenge – but easily within our capabilities. And in terms of overall complexity, this isn’t any worse than, say, a Space Shuttle launch, or the entirely robotic X37-B.
More fundamentally, though, what bothers me about all the criticism and concern about the MSL landing system is one of philosophy. We should be giving wild ideas a shot – experimental technologies, unconventional science experiments, risky missions. That is how we advance the state of the art: by pushing the envelope. If that means that once in a while our rockets explodes or our space probe smashes into a planet, then so be it. I have no problem with seeing NASA try something innovative a fail once in a while!
You see, we didn’t ever start with the Right Stuff. We learn the Right Stuff. And this is how we learn. We simply need to be willing to accept that fact if we want to go forwards.